I recently purchased a Celestron Nexstar 114GT telescope from David Hinds Ltd. This page represents my personal observations and views on this product.
The Scope has quoted optical characteristics of:
This seemed a good package for the price! The 114mm apature should allow a reasonable 250X useful magnification with an additional 4mm eyepiece.
The quoted characteristics fail to mention two things
Neither of these is an especially large issue but both should be noted if you are considering purchasing the scope.
The tripod is of a reasonable construction made from light aluminium. It extendible legs which are approximately 2 meters long fully extended. There is a small accessory tray provided which also doubles as a plate which wing-nuts are attached to to give the tripod its rigidity. Also attached to one leg of the tripod is the holder for the hand control.
The lack of an in-built spirit level and the fiddly setup if you don't wish to store the tripod assembled are a bit of an inconvenience. Also the rather disappointing design of the holder for the hand control means the tripods legs cannot be fully retracted with it in place. Finally the rather odd connector the mount uses means the tripod cannot be used for other applications nor replaced with a different manufacturers.
The scope mount is of a alt-az type. It is made from metal and is fairly sturdy. There is a rounded base which fits into the tripods connector and a ring fitting which takes the main tube of the telescope. On the main body of the scope are two connectors one for power and an RJ11 jack for communication with the hand unit.
The power connector here is very loose and not really suited for this application, a locking connector of some type would have been a much better solution or even power supplied through the hand controller which would mean only one cable to get wound up on the mount.
The mount may be turned when the power is off however it is very stiff.
This is the weakest part of the package and arguably the most important. It has a small LCD screen, back-lit with an orange/red colour. When power is applied it immediately moves into the auto align procedure which should be straightforward...
The model I received bore little resemblance in terms of its firmware to the manual. Everything from it not having the two star align procedure at all to it forgetting its settings on every use.
When the scope arrived and I followed the instructions in the manual the scope promptly tried to slew itself through the tripod supports, if I hadn't been paying attention might well of damaged the scope on its first use! This problem was experienced because contrary to the manual, which states a telescope type of "Nexstar114" should be used, is wrong. A type of "custom" and a code of 1059334 (kindly provided by David Hinds Ltd.) which apparently refers to the encoder resolution (fortunately this is retained across power cycles) should be used instead.
The scope is advertised as being computer controllable, at this time this is just plain wrong. The package does not contain the guidestar software promised nor can the GT controller use its serial port (according to Celestron). A copy of "The sky" is provided in its place but is of limited use if you already had a copy.
More details on these firmware bugs can be found at Les Blalock's excellent site on the Nexstar 80GT (same hand controller).
The optics are good and the small tube and light tripod make it ideal for rapid transport. The provision of a goto controller makes this the ideal starter package for the more serious amateur who wants a Newtonian scope. However as it stands the firmware in the hand controller cripples it. The requirements to enter the information afresh every power cycle, the poor menu layout and its tendency to try and select stars for auto alignment which have set are just annoying. However its inaccuracy in tracking and tendency to go into an infinite slew in the azimuth plane (probably due to power connector problems) are to me serious detractors from an otherwise good package.
I would like to say Celestron have produced a sub £500 auto-tracking telescope package I could recommend, but with its current controller I cannot.
Not content with just working round the bugs in celestrons hand controller and waiting for a possible new firmware release I decided to investigate the hardware in a little more detail.
It appears some serial commands can be sent to the hand controller after all but they require the auto alignment operation to have already been performed. And even when aligned the tracking isn't wonderful. Due to these constraints I abandoned this line of attempting to obtain better control.
I switched to the mount itself, I reasoned that the drive motors and the shaft encoders would be usable directly without the hand controller at all.
Initialy I did some thinking about the control system used, It is an RJ11 connector giving a maximum of 6 conductors, 2 of which obviously had to be for the hand controller power (positive and ground). This left 4 possible control lines and as I couldn't see any way to control two motors and get information back from two optical shaft encoders directly with 4 lines. So I reasoned there must be some form of multiplexing or intelligent control.
I proceeded to open the mount. The following was done in a static controlled enviroment. Do not attempt to open the mount unless you know what you are doing! I will not be held responsible for your errors!
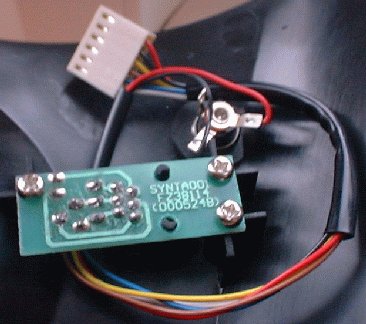
| The first is a small board with the rj11 jack soldered to it. It also has a short multi pole connector which attaches to the second board. | |
 |
The second more complex board is a multi layer smc type board. Click on the image to obtain more complete board specification. |
On this board are two 16C63A Microchip PIC controllers, a quick look in the reference manual revealed that these PIC chips support SPI and I²C and asyncronous serial interfaces , believing celestron engineers wouldn't make unnecessary work for themselves I proceeded to check the wiring based on the idea they would use one of these control systems. I soon discovered that indeed both PIC chips Asyncronous serial interfaces were wired together in parallel the other two control lines being grounded.
I attached a DSO to the hand controllers tx line (mounts rx obviously) and captured the arriving pulse train. I observed two pulse trains one after another, upon eaxining each block I discovered four distinct characters with a period of 1.86ms translates to baud rate of 5376.
Assuming the 16c63A is being used with its internal async. serial generator it has a primary baud rate base of Fclock/16.
Pic has a base clock of 4Mhz divide it by 16 for primary rate divisor to get a base baud of 250,000
A table of possible secondary divisors and their asociated period. All baud values rounded to 4s.f.
| Pic@250000 | ||
|---|---|---|
| Div | Period(ms) | Baud |
| 44 | 1.76 | 5682 |
| 45 | 1.80 | 5556 |
| 46 | 1.84 | 5435 |
| 46.5 | 1.86 | 5376 |
| 47 | 1.88 | 5319 |
| 48 | 1.92 | 5208 |
From this we can see the observeved period lies mid way between a divisor of 46 and 47. As it is unkown which is correct we will use a divisor of 46 and re-try with 47 if satisfactory results cannot be achived.
Assuming a given base baud rate divisor the following tables show how close the the required period can be achived with standard PC hardware. The error colums are in b.p.s. from the given pic divisor.| Base Freq | Div | Baud | Error-46 | Error-47 | ||
|---|---|---|---|---|---|---|
| bps | percentage | bps | percentage | |||
| 115200 | 20 | 5760 | 325 | 6 | 441 | 8 |
| 230400 | 41 | 5620 | 185 | 3 | 301 | 6 |
| 115200 | 21 | 5486 | 51 | 1 | 167 | 3 |
| 460800 | 85 | 5421 | -14 | 0 | 102 | 2 |
| 230400 | 43 | 5358 | -77 | 1 | 39 | 1 |
| 460800 | 87 | 5297 | -138 | 3 | -22 | 0 |
| 115200 | 22 | 5236 | -199 | 4 | -83 | 2 |
From this table it can be seen the closest achivable match is a base rate of 460800 and a divisor of 85 for the pics 46 rate and 87 for the 47 rate.
A circuit was constructed to convert the RS232 levels to TTL,hook up the GT handset and start pressing buttons to see if we can discover the on the wire protocol.
There's lots more to the site! A good place to start is the Main Page.
100% hand typed HTML
© Vincent Sanders